プラン機能のプラニングツール
このページでは、Jira Cloud Premium と Enterprise の一部としてのみ利用できる高度な計画機能について説明します。
プラン機能には、Jira エコシステムの他のソリューションにはない、長期のプラン向けに特別に設計されたツールが用意されています。
ロールアップ値
親作業項目と子作業項目は、より小さなタスクを含む上位レベルの作業項目を指す相対的な用語です。この概念はどの階層レベルにも対応します。
エピック (子作業項目) を含むイニシアチブ (親作業項目)
ストーリー (子作業項目) を含むエピック (親作業項目)
サブタスク (子作業項目) を含むストーリー (親作業項目)
このドキュメンテーションでは、アジャイルのベスト プラクティスに基づく階層レベルを参照するために、例でイニシアチブ、エピック、ストーリーを使用しています。ただし、Jira では、これらのラベルを管理者が設定できます。
A big problem for planners is that what you plan isn’t always what ends up happening. Instead of forcing you to manually update values of parent work items, you can tell your plan to infer values of parent work items based on those of the child work items. This is referred to as a roll-up.
タイムラインの [View settings (ビューの設定)] メニューから、次の値を推測するいずれかのオプションを選択します。
日付 - 開始日と終了日が含まれます。計画で日付がロールアップされる仕組みの詳細はこちらをご確認ください。
その他 - 見積もり値、リリース、スプリント、チームが含まれます。計画で見積もりがロールアップされる仕組みの詳細はこちらをご確認ください。
Rolling up dates is a calculation that only exists for planning purposes in your plan. When you commit changes back to your Jira work items, these rolled-up values aren’t saved and the date field of your work item will be empty.
たとえば、以下のスクリーンショットをご覧ください。
最上位の作業項目はエピックで、その中に 3 つのストーリーが含まれています。ロールアップ値が有効になっていると、該当するプランは子作業項目における最も早い開始日と最も遅い終了日を自動で選択して、親作業項目に適用します。そのため、子作業項目が再スケジュールされたり遅れたり該当するプランから削除されたりした場合でも (こうした事例はよく発生します)、エピックの値に自動で反映されて該当するプランは順調に継続されます。
警告
Your plan highlights places where it thinks there are errors such as work items that are missing sprint assignments or off-track dependencies, and more. These are referred to as Warnings.
これらをすべて表示するには、計画の上部にある [警告] ボタンを選択します。そうすると、次のようなウィンドウが表示されます。
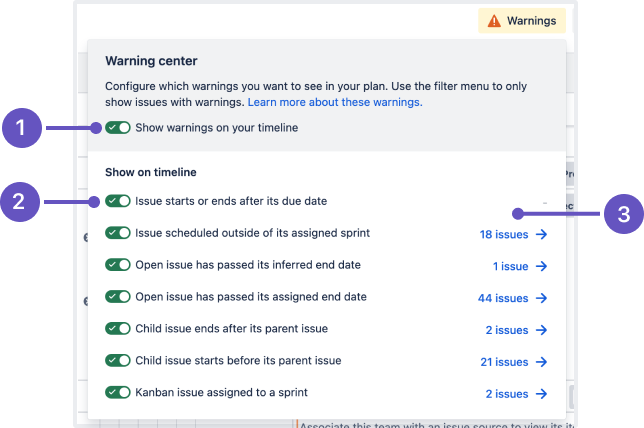
[タイムラインに警告を表示] トグルを使って、すべての警告をオンまたはオフにします。
個々の警告の横にあるトグルを使って、タイムラインで非表示にします。
View a list of the work items affected by each warning type.
これらの警告の意味と解決方法についてはこちらをご確認ください。
自動スケジューラー
プランでは、作業項目の見積、スケジュールされた作業項目、依存関係、リリース、チーム割り当てなど、すでに追加した情報に基づいて作業項目を自動でスケジュールできます。ここから、プランをそのままコミットすることも、さらに編集するためのテンプレートとして使用することもできます。
キャパシティとベロシティ
キャパシティとベロシティは、効率的で達成可能なプランを作成するために役立つ 2 つの機能です。
該当するプランのキャパシティとは、チームが 1 回のイテレーションで完了できるストーリー ポイントまたは時間数を表します。たとえば、30 ストーリー ポイント (初期設定) のキャパシティがあるチームには、1 つのイテレーションで各 5 ストーリー ポイントと見積もられる 6 つの作業項目を含められます。
該当する計画でのみ利用できるベロシティは、過去のパフォーマンスに基づくチームの長期的なイテレーションあたりの平均キャパシティです。たとえば、30 ストーリー ポイントのベロシティのチームは、35 ストーリー ポイントと見積もられるエピックの完了には 2 スプリントが必要となります (これらのスプリントに他の作業がすでに割り当てられていないと仮定した場合)。
これら 2 つの機能を組み合わせることで、チームの作業速度に基づいてプランが現実的になります。
その他の情報:
Rovo では、Rovo チャットを開いて /query-plan と入力すると、計画に関する質問の回答を得ることができます。「この計画にリスクはありますか?」のようなハイレベルの質問や、「未割り当てのエピックはいくつありますか?」のような具体的な質問をすることもできます。
この内容はお役に立ちましたか?